

Objectifs:
- Déterminer la période d’un pendule simple
I.3 Le pendule simple
C’est un solide de masse m, de petites dimensions accroché à l’extrémité d’un fil inextensible de masse négligeable et de longueur l très grande devant les dimensions du solide.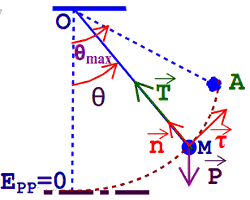
Il faut noter également que le moment d’inertie du pendule simple par rapport à son axe de rotation est donné par : \[{J_\Delta } = m{l^2}\]
- Etude dynamique
Ecarté de sa position d’équilibre et lâché sans vitesse initiale, il effectue des oscillations autour de sa position d’équilibre stable.
Il est soumis à l’action du poids et à la tension du fil.
Supposons le référentiel d’étude galiléen et appliquons le TCI dans la base de Frenet \((G;\overrightarrow n ,\overrightarrow \tau )\)
\(\overrightarrow P \left( \begin{array}{l} - mg\cos (\theta )\\ - mg\sin (\theta )\end{array} \right)\) \( + \overrightarrow T \left( \begin{array}{l}T\\0\end{array} \right) = \) \(m\overrightarrow {{a_G}} \left( \begin{array}{l}\frac{{{v^2}}}{l}\\l\ddot \theta \end{array} \right)\)\( \Rightarrow \) \(\left\{ \begin{array}{l} - mg\cos (\theta ) + T = ml{{\dot \theta }^2}\\ - mg\sin (\theta ) + 0 = ml\ddot \theta \end{array} \right.\) \[\left\{ \begin{array}{l}T = mg\cos (\theta ) + ml{{\dot \theta }^2}{\rm{ (1)}}\\\ddot \theta + \frac{g}{l}\sin (\theta ) = 0{\rm{ (2)}}\end{array} \right.\]
Un oscillateur est dit harmonique lorsque l’équation horaire régissant ses oscillations est de la forme : \[\theta (t) = {\theta _{\max }}\sin (\omega t + \varphi )\] et l’équation différentielle réguisant ses oscillations de la forme : \[\ddot \theta + {\omega _0}\theta = 0{\rm{ }}\]
De la relation (2), il est aisé de dire que le pendule simple n’est par un oscillateur harmonique.
Pour des amplitudes faibles; i.e. \(\sin (\theta ) \approx \theta \), Nous avons : \[\ddot \theta + \frac{g}{l}\theta = 0\] qui est l’équation différentielle d’un oscillateur harmonique de pulsation propre ω0\[\omega _0^2 = \frac{g}{l}\]
La solution de l’équation précédente est de la forme \(\theta (t) = {\theta _{\max }}\sin (\omega t + \varphi )\) avec θmax et φ dépendent des conditions initiales de l’expérience. Sa pulsation est : \({\omega _0} = \sqrt {\frac{g}{l}} \) etla période des oscillations : \[{T_0} = 2\pi \sqrt {\frac{l}{g}} \]
Évaluons la vitesse de ce pendule au cours de son mouvement.
D’après le théorème de l’énergie cinétique entre A et M, \({E_{{C_M}}} - {E_{{C_A}}} = \) \(W(\overrightarrow P ) + W(\overrightarrow T )\) \( \Leftrightarrow \) \(\frac{1}{2}mv_M^2 = \) \( - mg({z_M} - {z_A})\). \({E_{{C_M}}} = - mg((l - l\cos (\theta ))\) \( - (l - l\cos ({\theta _{\max }})))\), \({E_{{C_M}}} = mgl(\cos (\theta )\) \( - \cos ({\theta _{\max }}))\) Soit : \(v_M^2 = 2gl(\cos (\theta )\) \( - \cos ({\theta _{\max }}))\)
Nous pouvons ainsi déterminer l’intensité de la tension de la corde au point M. en effet : \({T_M} = mg\cos (\theta )\) \( + m\frac{{v_M^2}}{l}\) \( = mg[3\cos (\theta )\) \( - 2\cos ({\theta _{\max }})]\) Avec : \(v_M^2 = 2gl(\cos (\theta )\) \( - \cos ({\theta _{\max }}))\)
-Etude énergétique
Au point A, l’énergie mécanique est égale à l’énergie potentielle de pesanteur du solide. \({E_m}(A) = {E_{pp}}(A)\) \( = mgl(1 - \cos ({\theta _{\max }}))\) \( \approx \frac{1}{2}mgl\theta _{\max }^2\)
Au point M : \({E_m}(M) = \frac{1}{2}{J_\Delta }{{\dot \theta }^2}\) \( + mgl(1 - \cos (\theta ))\) \( \approx \frac{1}{2}mgl\theta _{\max }^2\)
À démontrer vous pouvez poser la question sur le forum du site si vous ne parvenez pas à le faire.
Em (A)=Em (M)
Il y a conservation de l’énergie mécanique du système pour des angles faibles.
La période propre To d'un oscillateur correspond à la période de ses oscillations libres en l'absence d'amortissement.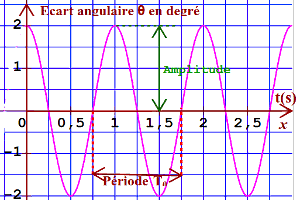
II.1 Cas d’un amortissement faible
La courbe des oscillations est la suivante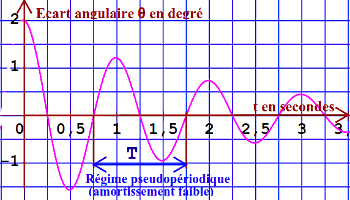 L’équation du mouvement d’un oscillateur soumis aux faibles amortissement est la suivante: \[\ddot \theta + \frac{\lambda }{m}\dot \theta + \frac{k}{m}\theta = 0\] avec \(\omega _0^2 = \frac{k}{m}\)
L’équation du mouvement d’un oscillateur soumis aux faibles amortissement est la suivante: \[\ddot \theta + \frac{\lambda }{m}\dot \theta + \frac{k}{m}\theta = 0\] avec \(\omega _0^2 = \frac{k}{m}\)
Le système oscille avec une amplitude décroissante : Les oscillations sont dites pseudo- périodique.
On montre que la pseudo-période est : \({T_1} = \frac{{2\pi }}{{{\omega _1}}}\) \( = \frac{{2\pi }}{{\sqrt {\omega _0^2 + \lambda } }}\)
Par définition l'amortissement très faible correspond à un coefficient d'amortissement λ très petit devant \(\lambda \prec \prec {\omega _0}\)
II.2 Cas d’un amortissement important
L’amortissement est important lorsque le solide revient à sa position d’équilibre stable sans osciller: le mouvement est apériodique.
La courbe des oscillations est la suivante 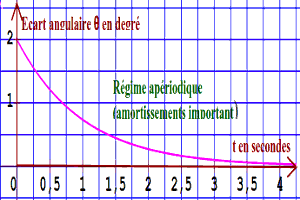 Il est possible d’obtenir des oscillations parfaitement régulières en les entretenant, i.e. en ajoutant au système une force extérieure appelée excitateur de pulsation variable. Lorsque ω = ω0 on parle de résonance d’amplitude.
Il est possible d’obtenir des oscillations parfaitement régulières en les entretenant, i.e. en ajoutant au système une force extérieure appelée excitateur de pulsation variable. Lorsque ω = ω0 on parle de résonance d’amplitude.
L’entretien des oscillations fournit de l’énergie au système pour compenser les pertes d’énergies dues aux frottements. L’équation devient : \(\ddot \theta + \frac{\lambda }{m}\dot \theta \) \( + \frac{k}{m}\theta = F(t)\) \( = {F_0}\cos (\omega t)\)
Un pendule bat la seconde lorsque sa demie période est égale à l’unité \[\frac{{{T_0}}}{2} = 1\]
